
PXEP-CN
概要
PXEP-CNは、当社独自開発のパルス生成ソフト「PGS」を搭載した、EtherCAT通信対応マスタであり、多機能モーションコントロールボードです。
PCI Express/USBに対応しております。
PCI Express/USBに対応しております。
詳細についてはお気軽にお問い合わせください。
- 製品の特長
- 製品の仕様
- 接続確認済Subデバイス一覧
タブ内容を展開する(公開サイトには表示されません)
タブ1(公開サイトには表示されません)
EtherCAT対応Mainデバイス 「PXEP-CN」Windowsベースで開発できる多機能モーションコントローラの紹介
特長
- EtherCAT通信対応のMainデバイス(マスタボード)です。
PCI Expressに加え、USB接続にも対応しました。 - 31軸モーション制御+IO制御が可能です。最大接続ノード数は31です。
- モーション制御には、当社独自開発のパルス生成ソフト「PGS」を搭載し、同期機能、軸連動機能、原点復帰機能、速度オーバーライド、移動量オーバーライド等様々な機能を実装しています。
- 原点復帰機能は、マスター方式15種類およびSubデバイスメーカ独自原点復帰に対応しています。
- CIA401/CIA402対応Subデバイスを簡単に制御できる関数を用意してあります。
- 多種のSubデバイス検証実績があります。接続についての詳細は当社までお問合せください。
- EtherCAT対応サーボのほか、ETGが認定したEtherCATテストセンタ(ETC)による公式テストに合格しているSubデバイス製品であれば、対応可能です。
- 特殊な開発環境を必要とせず、Windowsベースでアプリケーション開発が可能です。
機能
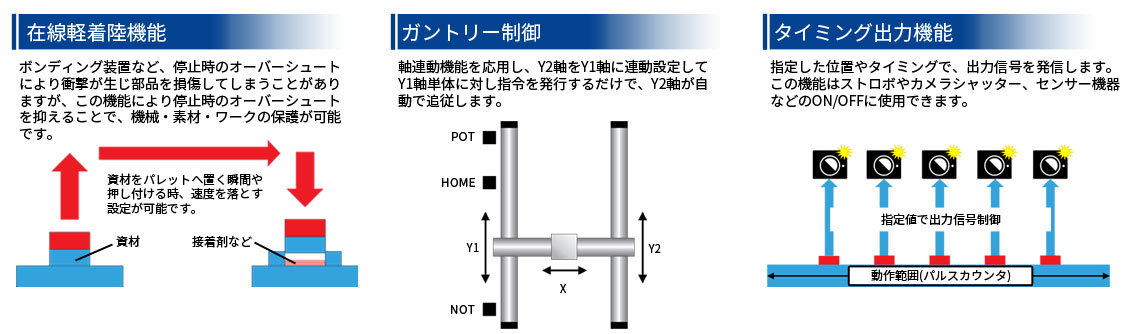
ピッチ誤差補正、軽着陸機能(軟着陸、ソフトランディング)、ガントリー制御(マルチヘッド)、タイミング出力機能などが簡単に実現できます。
コスモテックスの注目機能として紹介している機能もあるので是非ご覧ください!
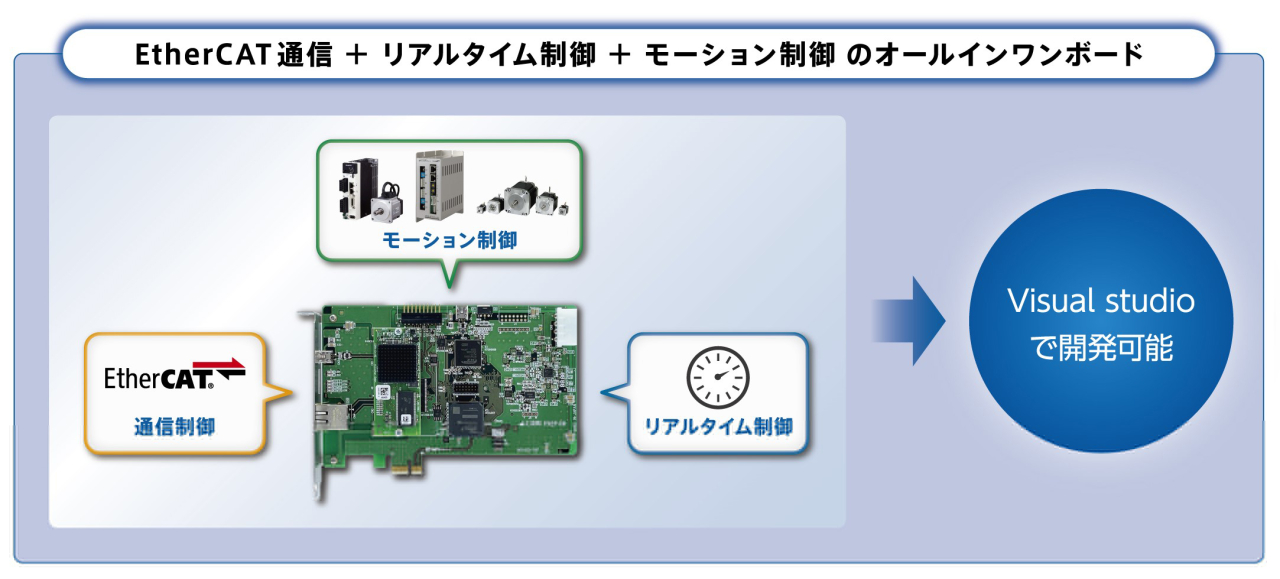
EtherCAT通信+リアルタイム制御+モーション制御のオールインワンボード
最大の特徴は、EtherCAT通信+リアルタイム制御+モーション制御が1つのボードに組み込まれていることです。
そのため、Visual Studioで開発が可能となっております。
多種のSubデバイス検証実績
多種のスレーブを検証しており、現在も検証を進めております。
また、検証済みの製品に関しては接続についての詳細をまとめたガイドも用意しております。詳細はお問合せください。
当社での検証実績のない製品もETGが認定したEtherCATテストセンタ(ETC)による公式テストに合格している製品であれば対応可能ですので、お客様が環境を整えることができればサポートいたします。
お問い合わせください。
EtherCAT対応Mainデバイス「PXEP-CN」 アプリケーション開発補助ツール「Sample GUI」紹介
装置アプリケーション開発の補助ツールとして、動作可能なUI付きのサンプルソースを提供しています。
このSampleGUIから、直接プログラムに転用していただくことでソフトウェア開発の工数削減に役立ちます。
また、実行プログラムにコンパイルすると動作確認用ソフトとして機能します。
この他にも、SampleGUIにない関数の作成などもサポートしています。
タブ1 終わり(公開サイトには表示されません)
タブ2(公開サイトには表示されません)
製品仕様
| モーション制御機能 | 仕様 |
|---|---|
| 最大制御ノード数 | 31 |
| 速度機能 | 1pps~400Mpps |
| ドライブ機能 | 絶対位置/相対位置 連続ドライブ |
| 原点復帰機能 | マスター方式15種類 Subデバイスメーカ独自原点復帰対応 |
| 加減速機能 | 直線 / S字 (対称・非対称 対応) |
| 補間機能 | 直線 / 円弧 / ヘリカル / アーチモーション |
| 同期機能 | 多軸同期スタート / 軸連動 / ガントリー 電子カム / ピッチ誤差補正 |
| オーバーライド | 加速時間 / 減速時間 / 目標速度 / 移動量 |
| リミット機能 | ソフトリミット / ハードリミット |
定格・通信仕様
| 項目 | 仕様 |
|---|---|
| 通信規格 | EtherCAT® |
| 指令・更新周期 | 250~65535μs (250μs刻み) |
| オペレーション | CSP/HM/PV/TQ/VL/PP |
| 対応Subデバイス | CIA401 / CIA402 / その他 |
| インターフェイス | PCI-Express Rev 1.1 準拠 USB 2.0 |
| 電源電圧 | DC +5V±5% (ATX電源より供給) |
| 外形寸法 | 111.15×167.65 (コネクタ,取付金具部含まず) |
| 対応規格 | RoHS10物質対応 |
動作環境
| 対応OS | 開発・動作環境 |
|---|---|
| Windows 10 (32bit ⁄ 64bit) | Visual Studio 2019 以降 .NET Framework4 以上 |
| Linux Ubuntu | 順次対応予定 |
対応言語
| 対応OS | 対応言語 |
|---|---|
| Windows 10 (32bit ⁄ 64bit) | VC++ C#.NET VB.NET Python |
検証実績
| 項目 | 仕様 |
|---|---|
| 会社数 | 25社以上 |
| Subデバイス数 | 50種類以上 |
| 接続について | お気軽にお問い合わせください |
EtherCAT®は、ドイツBeckhoff Automation GmbHにより ライセンスされた特許取得済み技術であり登録商標です。
Microsoft Visual StudioはMicrosoft社の登録商標です。
タブ2 終わり(公開サイトには表示されません)
タブ3(公開サイトには表示されません)
接続確認済Subデバイス一覧
当社で接続を確認しているスレーブは一部となりますが下記の通りです。
必ずしも動作を保証するものではございませんので、実際の動作につきましてはお客様の環境において確認して下さい。
各Subデバイスの接続情報についての詳細を確認したい場合は、当社までお気軽にお問い合わせ下さい。
ドライバ
| 名称 | メーカ名 |
|---|---|
| サーボアンプ 1Sシリーズ | オムロン(株) |
| α STEP AZシリーズ 1軸タイプ | オリエンタルモーター(株) |
| α STEP AZシリーズ 1軸タイプ miniドライバ | オリエンタルモーター(株) |
| α STEP AZシリーズ 多軸一体型 | オリエンタルモーター(株) |
| サーボアンプ SANMOTION R ADVANCED MODEL | 山洋電気(株) |
| サーボアンプ MINAS-A6Bシリーズ | パナソニック インダストリー(株) |
| サーボアンプ MINAS-A6BLシリーズ | パナソニック インダストリー(株) |
| サーボアンプ リニアモータ対応 ADVシリーズ | (株)日立産機システム セット検証 リニアモータ:IKO ナノリニア 日本トムソン(株) |
| サーボアンプ ALPHA7 (VCタイプ) | 富士電機(株) |
| サーボアンプ Σ-Xシリーズ | (株)安川電機 |
| サーボドライバ VPHシリーズ | CKD(株) |
I/O等
| 名称 | メーカ名 |
|---|---|
| リモートI/O変換器 R80 シリーズ | (株)エムジー |
| 16点入力ターミナル GX-ID11611 | オムロン(株) |
| 16点出力ターミナル GX-OD1611 | オムロン(株) |
| EtherCAT カプラユニット NXシリーズ | オムロン(株) |
| センサー通信ユニット E3NW-ECT | オムロン(株) |
| 通信ユニット DL-EC1A | (株)キーエンス |
| 通信ユニット NU-EC1A | (株)キーエンス |
| EtherCAT対応通信ユニット HGシリーズ用 | パナソニック インダストリー(株) |
| バスカプラ - AXL F BK EC | フェニックス・コンタクト(株) |
| EtherCAT通信変換器COM-ME-3 | 理化工業(株) |
| EtherCAT フィールドバスカプラ 750シリーズ | ワゴジャパン(株) |
| ポジションコントローラーRCON-GWシリーズ | (株)IAI |
| ソレノイドEX260シリーズ | SMC(株) |
| ステップモータコントローラ JXC Series | SMC(株) |
※記載されている会社・製品名等は各社の商標または登録商標です。
※EtherCAT®は、ドイツBeckhoff Automation GmbHによりライセンスされた特許取得済み技術であり登録商標です。
タブ3 終わり(公開サイトには表示されません)
ここまで
(公開サイトには表示されません)




