
用語集
- あ〜わ
- その他
タブ内容を展開する(公開サイトには表示されません)
タブ1(公開サイトには表示されません)
あ行
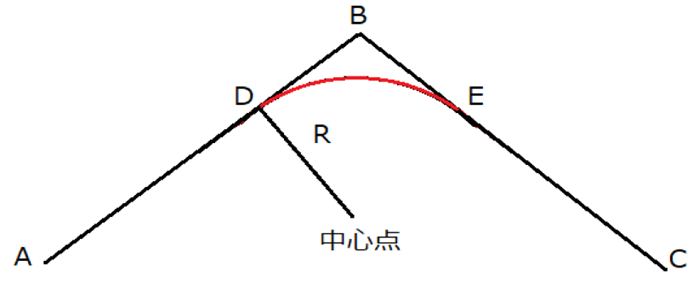
- アーチモーション機能
2つの隣接した直線補間を指定した半径の内接円で滑らかに接続する機能です。
AB線とBC線の直線補間の場合、アーチモーションを使うとDの位置で指定した半径の円弧補間でE点まで行き、E点で再びC点まで直線補間を行います。
- アラーム(LSI機能:ALM)
-
ALM(Alarm/DERR)の事で、急停止を行う機能もしくは端子名を表します。方向性が無く、どちらの方向にドライブしていても停止します。主にモータドライバのアラームと接続し緊急停止用に使用します。
- イーサキャット(EtherCAT)
-
「EtherCAT(イーサキャット)」とは、ドイツ企業ベッコフオートメーション(BeckhoffAutomation)によって開発されたイーサネットと互換性のあるオープンなフィールドネットワークの一つです。
- 位置決めドライブ
-
指定したパルス数(プリセットパルス数)をドライブし、停止します。動作前に移動量が決定している場合に使用します。プリセットパルスドライブ、とも言います。
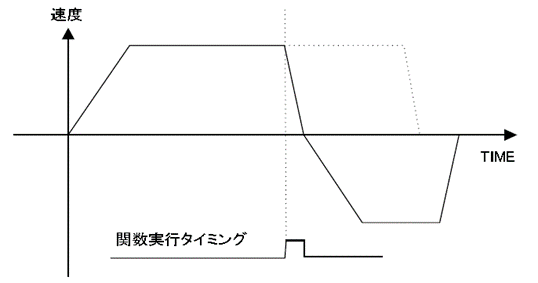
- 移動量オーバーライド
ユーザが任意のタイミングでドライブ中に移動量を変更する事を、移動量オーバーライドと呼びます。
- インポジション(LSI機能:INP)
INP(Inposition/DEND)の事で、位置決め完了信号もしくは端子名の事を表します。
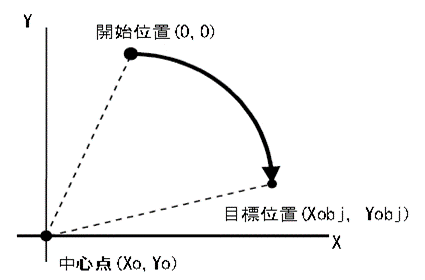
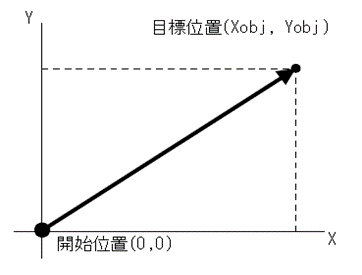
- 円弧補間
円弧補間では、開始位置は現在位置となりますので、描かれる円弧の中心点及び目標位置(Xobj,Yobj)をそれぞれ設定します。任意2 軸の右回り円弧補間/左回り円弧補間が可能です。
か行
- 急停止
-
非常停止入力信号(ESTOP),急停止リミット入力信号(NOT,POT)により、ドライブの急停止を行います。
- 急停止リミット(LSI機能:±ELM)
-
±ELM(EmergencyLimit)の事で、急停止を行う機能もしくは端子名を表します。方向性があり、ドライブ方向と一致している場合に停止します。主に、各方向のリミットとして使用します。
- 緊急停止(LSI機能:ESTOP)
-
ESTOP(EmergencyStop)の事で、急停止を行う機能もしくは端子名を表します。方向性が無く、どちらの方向にドライブしていても停止します。主に装置全体の緊急停止用に使用します。
- 減速停止(LSI機能:SSTOP)
-
SSTOP(SlowdownStop)の事で、減速停止を行う機能もしくは端子名を表します。方向性が無く、どちらの方向にドライブしていても停止します。主に装置全体の減速停止用に使用します。
- 減速停止
-
減速停止リミット入力信号(NOT,POT)および軸停止関連関数により、ドライブの減速停止を行います。減速停止する場合、設定されている加減速モードにより動作が異なります。
- 減速停止リミット(LSI機能:±SLM)
-
±SLM(SlowdownLimit)の事で、減速停止を行う機能もしくは端子名を表します。方向性があり、ドライブ方向と一致している場合に停止します。主に、各方向のリミットとして使用します。
- 合成距離自動設定
-
XYテーブルとXYZ テーブルに限って、設定した各従軸の移動距離により、自動的に合成距離を計算し主軸の移動距離に設定することで、設定した主軸速度が合成速度になる機能
さ行
- サイクリックポジション(RTEX:CP制御)
- RealtimeExpress(RTEX)において、指令位置を一定の更新周期にて更新(送信)して動作する位置制御方法です。当社のコントローラは、0.5m/secの指令更新周期で最大32軸までの位置指令を制御(送信)する事ができます。
- サイクリックシンクロナスポジション(EtherCAT:CSP制御)
-
EtherCATモーション制御において、DC同期によって複数スレーブでのサイクリック補間動作が実現でき、多軸ロボットなどの制御で利用される特徴的な機能の一つです。
- サイクリック速度(RTEX:CV制御)
-
RealtimeExpress(RTEX)において、指令速度を一定の更新周期にて更新(送信)して動作する位置制御方法です。当社のコントローラは、0.5m/secの指令更新周期で最大32軸までの位置速度を制御(送信)する事ができます。
- サイクリックトルク(RTEX:CT制御)
- RealtimeExpress(RTEX)において、指令トルクを通信周期にて更新(送信)して動作するトルク制御モードです。速度制限値はパラメータにて設定できます。
- ソフトリミット停止
-
パルスカウンタ値をソフト的にリミットとして設定することで、外部信号がなくても停止させることができます。さらに外部信号と併用して使用することで、万が一、外部の異常により外部信号の入力が無い場合にも、ソフトリミットにより動作を停止させることができます。
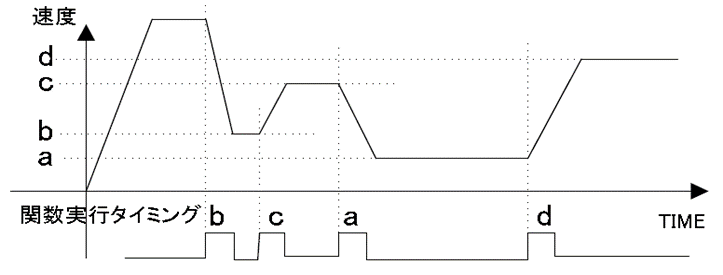
- 速度オーバーライド
ユーザが任意のタイミングでドライブ中に速度を変更する事を、速度オーバーライドと呼びます。
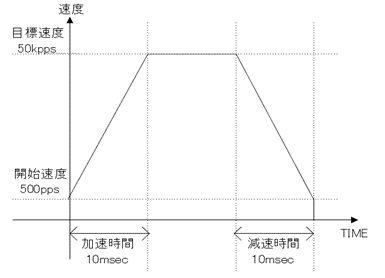
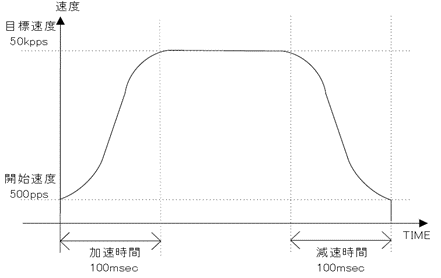
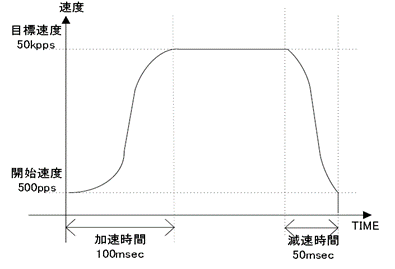
- 速度パラメータ
-
開始速度(単位:pps)、停止速度(単位:pps)、目標速度(単位:pps)、加速時間(単位:ms)、減速時間(単位:ms)、S字比率(単位:%)
た行
- 直線補間
指定された全ての軸が、指定された目標位置に同時に到着する機能です。各軸に指定された目標位置は同一とは限らず、目標位置が遠い場合は速度が速く、目標位置が近い場合は速度が遅く移動する事によって全ての軸が同時に目標位置に到達する事になります。
- 直線加減速
直線加減速モードは、加速/減速が対称な、直線(等加速度)加減速を行うためのモードであり、一般的に台形制御と呼ばれている加減速制御で最も基本的な加減速方法です。
- 電子カム機能
-
当社のコントローラでは、等加速度/単弦/サイクロイド/変形台形/変形正弦/変形等速の6種類に対応しています。
特にRTEXを用いたコントローラでは、通信周期毎に位置情報計算を行い、なめらかな曲線を実現しています。
は行
- 偏差カウンタクリア(LSI機能:DCC)
-
サーボモータドライバの偏差カウンタをクリアする機能を表します。信号名はDCC(DeviationCounterClear)と表記されます。
- プロファイルポジション(PP制御)
-
準備中
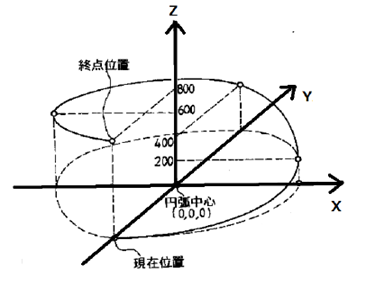
- ヘリカル補間
円弧補間に深さ方向の動きが加わった補間動作です。任意軸の右回りヘリカル補間/左回りヘリカル補間が可能です。
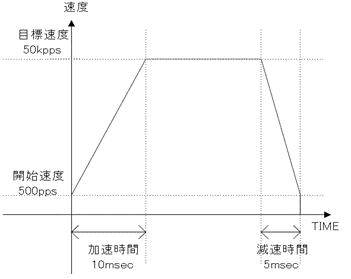
- 非対称直線加減速
非対称直線加減速モードは、加速/減速が非対称な、直線(等加速度)加減速を行うためのモードです。
モータに掛かる負荷が、加速時と減速時で異なるシステムの場合(例えば上下方向の制御)等で使用します。
- 補間制御(LSI機能:IP)
-
補間とは指定した補間種類により、全ての補間軸が同時に開始位置から動き出し、同時に目標位置に到達する制御のことをいいます。
直線補間、円弧補間、ヘリカル補間など様々な駆動方法に合わせた種類があります。
ま行
- 目標速度
-
ドライブが一定速度に入った時の速度です。目標速度を変更することで、速度オーバーライドを行うことができます。オブジェクトスピード、とも言います。
ら行
- リアルタイムエクスプレス(RTEX)
-
RealtimeExpress(RTEX)は、サーボに要求される高度なリアルタイム性を実現するために、パナソニック社が独自開発した先進のネットワークです。プロトコルが非常にシンプルであり、一般的なモーションネットワークのようなネットワークの確立・スレーブノードの認識を意識する必要がなく、制御アプリケーションを構築できます。
- 連続ドライブ
-
なんらかの停止指令が入力されるまでドライブを続ける、連続ドライブです。動作前に移動量が決定していない場合に使用します。コンティニュアスドライブ、とも言います。
タブ1終わり(公開サイトには表示されません)
タブ2(公開サイトには表示されません)
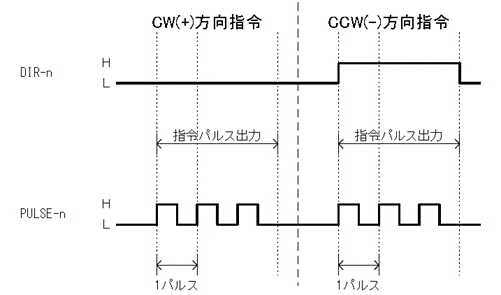
- 1パルス方式
DIR=CW/CCW信号、PULSE=指令パルス数とする方式です。DIR信号の立ち上がり方(アクティブレベル)で回転方向が変化します。
切替パターンは全部で4種類あります。
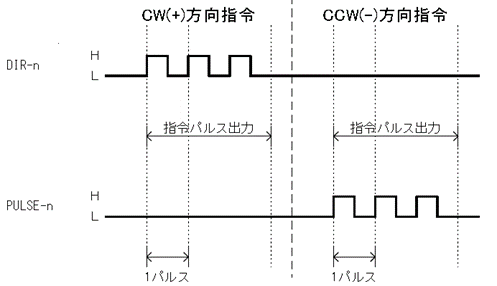
- 2パルス方式
DIR=CW、PULSE=CCWとし、波形の数がパルス数とする方式です。CW/CCWは4種類のパターンがあります。
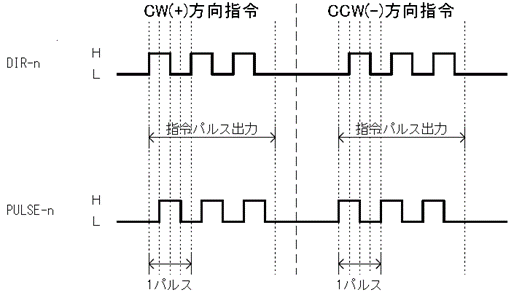
- 2相パルス方式
2相出力(90度位相)を、DIR=A相/PULSE=B相としてパルス出力する方式です。AB相とアクティブレベルの組み合わせで4種類あります。
- S字区間(LSI機能:SW)
-
SW(S-CurveWidth)の事で、S字加減速のS字区間の幅を設定するパラメータを表します。
- S字加減速
- 加速度を時間変化させることにより、機械への衝撃や振動を最小限に抑えることのできる加減速方法です。サーボアンプの制振制御と組み合わせることでより振動を抑える効果があります。(左:対象加減速/右:非対称加減速)
- POT/NOT
-
減速停止リミット入力信号(NOT,POT)および軸停止関連関数により、ドライブの減速停止を行います。初期状態はPOTは正方向駆動禁止、NOTは負方向駆動禁止として機能します。
タブ2終わり(公開サイトには表示されません)
ここまで
(公開サイトには表示されません)