
メカの誤差をソフトで解消
ピッチ誤差補正(位置補正)
当社のフィールドバス製品の位置補正制御。
メカの誤差をソフトで解消するための機能です。
当社が独自開発したアルゴリズム「PGS」を組み込んだEtherCAT対応Mainデバイス「PXEP-CN」、Realtime Express(RTEX)対応マスタ「PXRP-3216CN」及び「CSRP-32CN-RP」を使用すれば簡単にピッチ誤差(目標位置と実際の停止位置との誤差)を補正することができます。
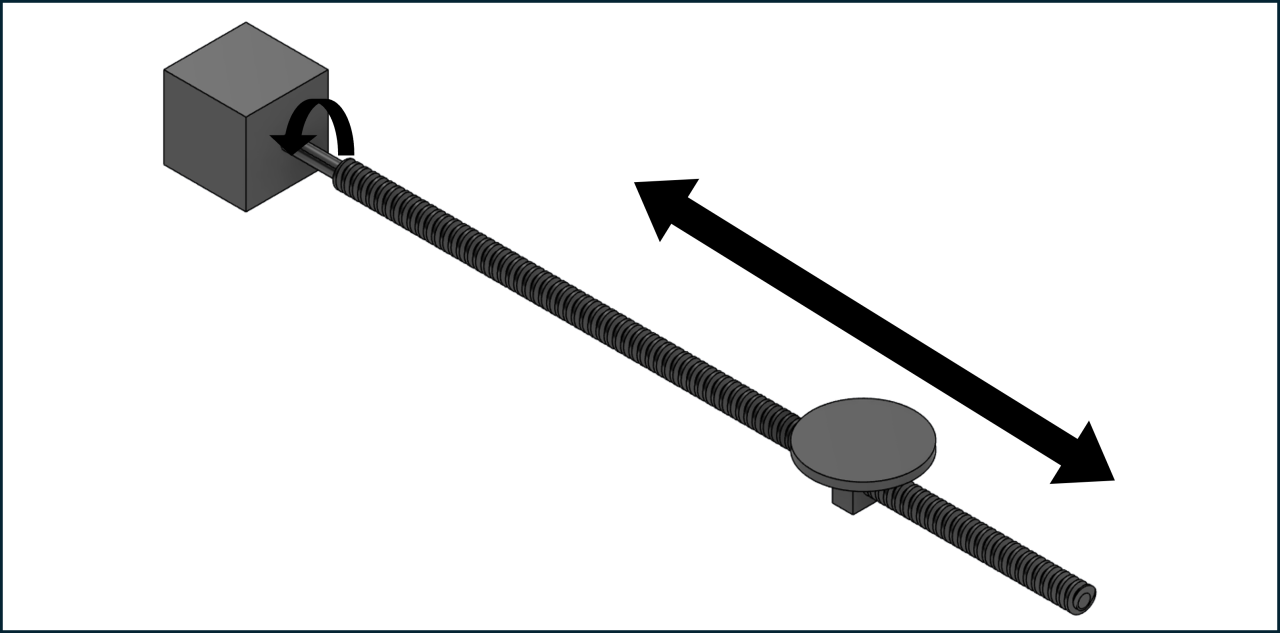
例えば、ボールねじを使用していくと摩耗により位置ズレが生じます。
そのズレてしまった位置と目標位置とのズレを補正する機能となります。
誤差をあらかじめ測定して記憶させておき、駆動時に誤差を指令位置の値に加算して位置決めすることで、ピッチ誤差を補正します。
ピッチ誤差補正機能を使用する前は精度が46μmだったのが、ピッチ誤差補正機能使用後は精度が3μmになり、精度が15倍近く改善されたという実績があります。
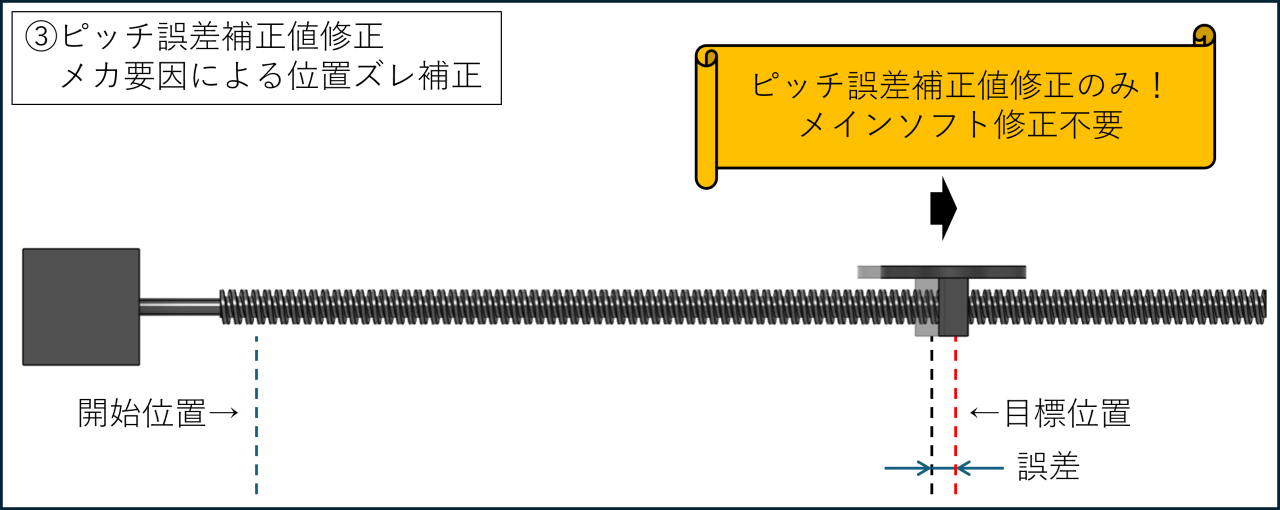
ボールねじ機構モデルを使用した図解
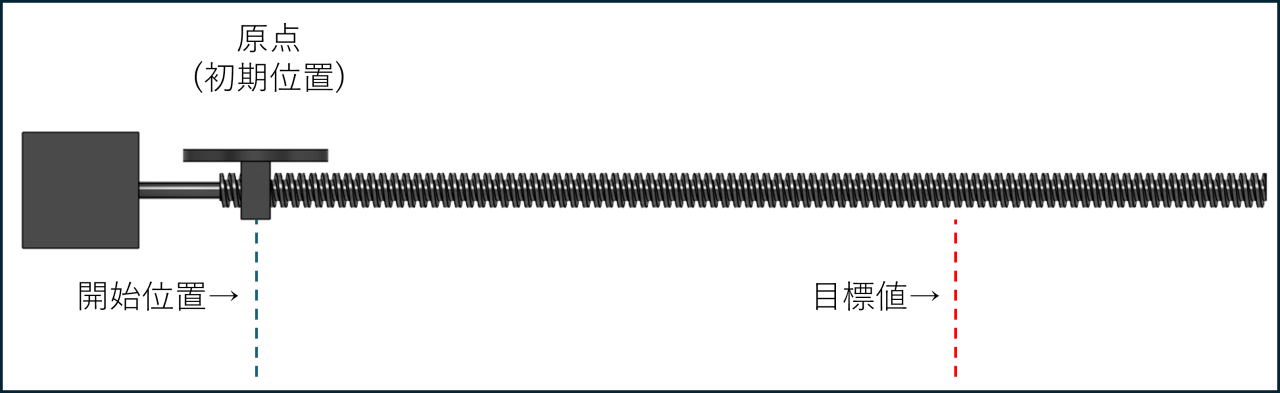
このようなボールねじの機構があるとします。
開始位置は青い線の位置、目標位置は赤い線の位置とします。
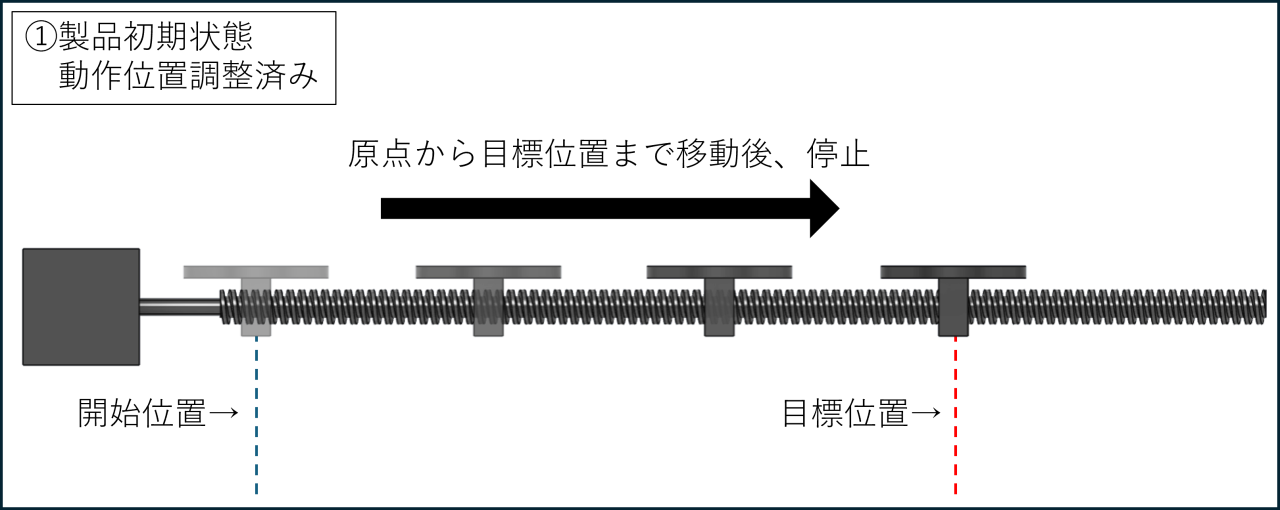
製品を最初に導入したときは摩耗していないので、設定した目標位置まで移動し、停止します。
通常はこのままでも問題ありません。
このときに、当社のネットワークマスタを使用している場合、あらかじめ「ピッチ誤差補正」用の関数をメインプログラムに組み込んでおきます。
この時の補正値は 0 です。
装置を動作させ続けると、ボールねじが摩耗し、メカ要因の位置ズレが発生します。
停止位置から目標位置までの誤差を測定し、位置を調整し、プログラムを修正するのには時間がかかります。
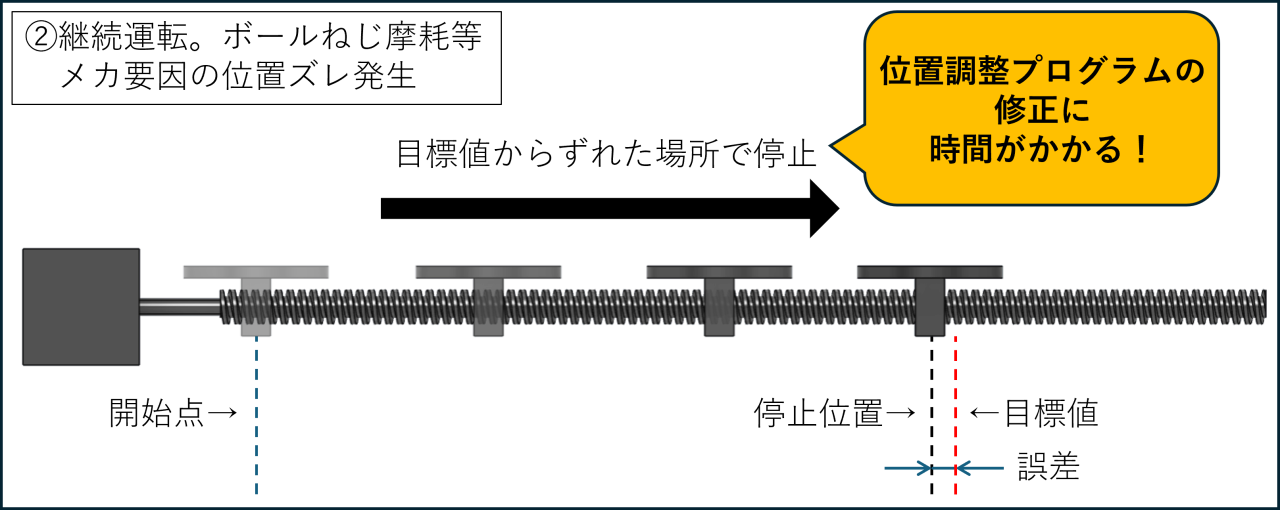
当社のネットワークマスタを使用し、「ピッチ誤差補正」を実現する関数をあらかじめプログラムに組み込んでおけば、補正値の修正をするだけで他の部分の修正をせずに位置ズレを補正することが可能です。
ピッチ誤差補正用関数搭載製品
EtherCAT対応
PXEP-CN
- EtherCAT対応
- PCI Express/USB2.0対応
- モーション制御+IO制御(最大接続ノード31軸)
- Linux対応相談承ります
- Python対応
Realtime Express(RTEX)対応
CSRC-32CN-RP

- Realtime Express(RTEX)対応
- USB2.0対応
- 制御軸数32軸
Realtime Express(RTEX)対応
PXRP-3216CN
- Realtime Express(RTEX)対応
- PCI Express対応
- 制御軸数 RTEX32軸+パルス列制御4軸